
Демпфер рыскания установлен в системе управления рулем направления, чтобы улучшить характеристики бокового движения самолета и избежать непрерывных колебаний «голландского тангажа.
«Голландский шаг» (Dutch roll) появляется в результате относительно слабой путевой устойчивости и чрезмерной поперечной устойчивости самолета. Когда самолет вращается вокруг продольной оси, скольжение к опускающемуся крылу происходит самопроизвольно из-за возникающей в результате боковой составляющей силы тяжести. Это сразу приводит к появлению момента поперечной устойчивости M x β, который имеет тенденцию уменьшать результирующий крен. На самолетах с высокой боковой устойчивостью это может быть значительным.
В то же время существует момент путевой устойчивости M y β, который имеет тенденцию к повороту носовой части летательного аппарата в направлении результирующего скольжения. Поскольку на многих самолетах курсовая устойчивость намного слабее, чем поперечная, восстановление скольжения отстает от восстановления крена. По инерции самолет без крена проходит позицию и начинает катиться в противоположном направлении. Следовательно, самолет без вмешательства в управление будет совершать непрерывные колебания по крену и скольжению.
Демпфер рыскания искусственно увеличивает курсовую устойчивость и, таким образом, предотвращает вибрации.
Чувствительным элементом демпфера рыскания является двухстепенной гироскоп, реагирующий на угловую скорость ω y , относительно нормальной оси Y. Этот сигнал фильтруется и усиливается в зависимости от скорости полета по сигналу от компьютера, рассчитывающего высотно-скоростные параметры (Air Data Computer).
Далее сигнал поступает на управляющий золотник демпфера (см. схему главного рулевого привода РН в разделе «Путевое управление»).
Золотник управляет перемещением исполнительного привода демпфера, что смещает центр вращения первичного и вторичного суммирующих рычагов и, таким образом, суммируется с перемещением педалей от летчиков и приводит к перемещению штока главного рулевого привода руля направления.
В этом случае движения привода заслонки не передаются на педали, и пилот не может тактично ощущать работу заслонки. Для проверки его работы выводится индикатор, показывающий отклонения привода заслонки.
Удобное рулевое управление: штанга изначально должна отклоняться в сторону, противоположную повороту. После этого стрела может вернуться в нейтральное положение или даже наклониться в сторону разворотной полосы. Это связано со сложным законом отклонения руля направления, когда руль направления реагирует на быстро меняющуюся составляющую угловой скорости поворота и не реагирует на ее постоянную составляющую.
Основные направления повышения рентабельности на предприятии ...
... основу рыночной экономики. Цель данной работы - раскрыть теоретические основы данной темы и определить основные направления повышения рентабельности на данном предприятии. Для достижения ... метод поассортиментного планирования прибыли (т.е. определение прибыли по каждой ассортиментной группе). 2 Показатели рентабельности предприятия Рынок предъявляет определенные требования к хозяйствующим субъектам ...
При нормальной работе амортизатора в полете отклонения полоски индикатора практически незаметны.
На самолетах новой комплектации с установленным интегрированным узлом связи (IFSAU) между САУ и самолетом (см. Система автоматического управления), при выпущенных закрылках сигнал демпфера усиливается на 29% для противодействия усиливающейся поперечной устойчивости. Кроме того, сигналы с частотой 8 Гц подавляются на 50%, чтобы уменьшить вибрацию и повысить комфорт пассажиров.
Координированное скольжение
Согласованное планирование — это маневр управления, выполняемый при летных испытаниях самолета. Он позволяет выявить характеристики поперечной устойчивости и управляемости самолета, в частности взаимную эффективность поперечного и путевого управления. Во время выполнения прямой полет поддерживается на постоянной высоте и скорости с постепенным отклонением ступенчатого руля направления. Чтобы в результате проскальзывания самолет не смещался с прямой траектории, создается крен в противоположном направлении. Следовательно, боковая составляющая силы тяжести будет компенсировать боковую силу от скольжения. В данном маневре путевой канал как бы борется с поперечным. Если нет пределов сопротивления, то отклонения руля направления осуществляются до полного износа. Как правило, первые стоят на упоре педали, а у бокового управления еще есть запас. Но бывает и наоборот.
В отчете о расследовании авиакатастрофы Boeing 737-200 3 марта 1991 года в районе Колорадо-Спрингс NTSB опубликовало результаты скоординированного планирования, выполненного на скорости 150-160 узлов с различной конфигурацией закрылков от 40 до 10 градусов.
Рассматривался случай полного отклонения (непроизвольного увода) руля направления вправо на 25 градусов.
Таким образом, из таблицы видно, что перемещение руля направления в крайнее положение не опасно, когда закрылки выпущены в положение от 40 до 25 градусов. Кренящему моменту возникающего в результате проскальзывания можно противодействовать, отклонив рулевое колесо на угол от 35 до 68 градусов соответственно. Объясняется это резко возросшей эффективностью отклоняемых в полете интерцепторов (flight spoilers), которые срывают поток с закрылка на той половине крыла, которая должна опускаться.
При угле выпуска закрылков менее 25 градусов полного отклонения штурвала не хватает для парирования увода руля направления (на скорости эксперимента – 150-160 узлов).
Так, с ластами 15 баланс получился только при d PH = 23 градуса, с ластами 10 — при d PH = 21 градус.
Нижняя строчка таблицы не относится к координированному скольжению. В этом случае баланс был достигнут путем поворота вправо с креном на 40 градусов. При этом рулевое колесо отклонено влево на полный угол и достигается уменьшение угла скольжения с 16 до 13 градусов за счет появления демпфирующего момента хода MY wy от угловой скорости поворота.
Также в этом отчете есть информация о том, что поведенные исследования показали, что при уменьшении скорости до определенной величины, эффективности поперечного управления, с закрылками, выпущенными на 1 градус, становится недостаточно для парирования увода руля направления в крайнее положение. Данная скорость названа «скорость критической точки»(crossover airspeed).
Основы государственного и муниципального управления : «Основные ...
... возникают в организации, почему, как долго обычно существуют конфликтные ситуации, как разрешаются конфликты. Изучите методы управления конфликтами, используемые в этой организации, чтобы определить ее ... на работе и деятельности участников. Конфликты почти всегда негативно влияют на развития личности. Появлению деструктивных конфликтов содействуют субъективные поводы [11]. По направлению конфликты ...
Система автоматического управления
Система автоматического управления самолетом (AFCS) состоит из трех независимых систем: цифровой системы управления полетом (DFCS), демпфера рысканья (см. Боковая устойчивость и управляемость) и автомата тяги. Эти системы обеспечивают автоматическую стабилизацию самолета по тангажу, крену и скольжению и управление самолетом по сигналам радионавигационных средств, бортового навигационного компьютера (FMC), компьютера высотно-скоростных параметров (ADC) и стабилизацию курса.
Связь между цифровой системой управления и самолетом осуществляет в зависимости от комплектации самолета узел связи (AFC) или интегрированный узел связи (IFSAU).
В зависимости от этого несколько меняется работа демпфера рысканья.
Автоматическое управление самолетом осуществляется через руль высоты и элероны. На самолет модификации «НГ» возможна установка автоматического рулевого управления.
Также происходит автоматическое снятие усилий со штурвала в продольном канале (с возвращением штурвальной колонки в нейтральное положение) путем перестановки стабилизатора. Автоматического снятия сил в поперечном канале нет, поэтому запрещено использовать триммер элеронов при активном автопилоте. В этом случае рулевая машина автопилота будет пересиливать пружину загрузочного механизма (aileron feel and centering unit) и, при отключении автопилота, самолёт начнёт неожиданно для лётчика крениться.
Похожий случай произошел 6 сентября 2011 г в ANA, хотя там пилот из-за непроизвольного отклонения механизма триммера руля направления вырвал из равновесия гусеничный канал, что привело к отключению автопилота и резкому крену руля направления самолет.
В полете с включенным автопилотом рулевая колонка и рулевое колесо должны находиться в нейтральном положении. Это говорит об отсутствии усилий в проводке руля высоты и элеронов. Отклонение штурвальной колонки от нейтрали является признаком отказа управления стабилизатором или его ухода (runaway).
Отклонение рулевого колеса свидетельствует о поперечной (путевой) несимметрии самолета, неравномерной выработке топлива или несимметричной тяге двигателей. Техника обрезки бокового канала описана в разделе «Боковая стабильность и манипуляции».
В случае полета с несимметричной тягой двигателей пилот должен самостоятельно управлять взлетно-посадочным каналом, отклоняя педали. В противном случае точность выдерживания заданных параметров полета не гарантируется.
Отключение автопилота (DFCS) индицируется миганием красных ламп-кнопок «A/P P/RST» и звуком сирены, а отключение автомата тяги – только красными лампами-кнопками «A/T P/RST». Согласно отчета AAIB (Air Accidents Investigation Branch) о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года, отсутствие звуковой сигнализации отключения автомата тяги явилось причиной, способствующей инциденту. При заходе на посадку, когда двигатели работали в режиме «Lowthrottle», дроссельная заслонка была отключена, что осталось незамеченным экипажем. На глиссаде снижения самолет потерял скорость до 82 узлов (на 20 км/час ниже V REF) и вышел на режим сваливания.
Рулевое управление и тормозная система автомобиля. рулевое управление
... – Схема рулевого управления автомобиля ЗИЛ-130. Рулевое управление автомобиля ЗИЛ-130 (рис. 191) включает рулевой механизм 10 с гидроусилителем рулевого привода, масло ... скольжения. Разница углов поворота определяется углом наклона левого и правого трапециевидных рычагов поворота. Рис. 187 - Рулевое управление автомобиля: ... с рейкой, перемещая в осевом направлении сектор регулировочным винтом 22. Винт ...
Кроме управления самолётом цифровая система управления полетом (DFCS) выдаёт на индикацию лётчикам отклонения директорных планок по крену и тангажу. Эти отклонения эквивалентны командам на рулевые машины автопилота. Следовательно, когда автопилот выключен и пилот управляет самолетом в соответствии с указателями направления, он выполняет работу рулевой рубки автопилота. Пилотирование по мнению руководителей значительно повышает точность выдерживания заданных режимов, но отвлекает пилота от сканирования и анализа показаний приборов, т.е способствует ухудшению летных возможностей. Этому способствует политика авиакомпаний, которая во имя комфорта пассажиров запрещает своим пилотам летать с выключенным директором даже в простых погодных условиях. Проблема потери лётным составом навыков управления самолётом при выключенных средствах автоматизации неоднократно поднималась на международных конференциях по безопасности полётов, но воз и ныне там.
Полет самолета при несимметричной тяге
Рассмотрим поведение самолета сразу после отказа одного из двигателей и потребное управление (балансировку) для обеспечения прямолинейного полета с одним остановленным двигателем.
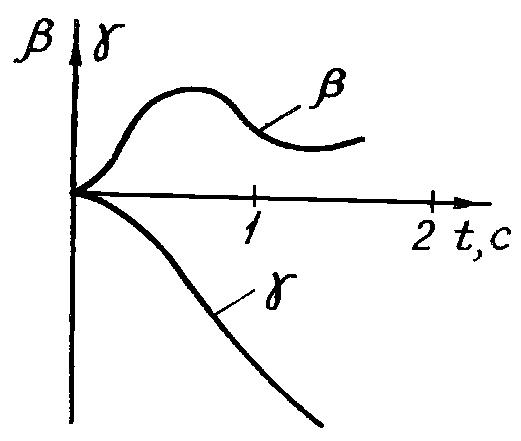
Пусть отказал левый двигатель. Момент рыскания MU DV начнет действовать на самолет, поворачивая его влево. На правом крыле будет пробуксовка, отсюда момент крена Мх b в сторону крыла при выключенном двигателе. На рисунке показано примерное изменение углов скольжения и крена при выключенном левом двигателе.
Поскольку поперечная устойчивость велика (особенно с выпущенными закрылками), то накренение будет происходить энергично, так что требуется немедленное вмешательство пилота. Для противодействия кренящему моменту при работе двигателя на взлетном режиме полного прогиба рулевого колеса недостаточно. Необходимо убрать скольжение рулем направления.
Рассмотрим, каковы условия баланса в длительном полете с неработающим двигателем. Проанализируем два специфических случая балансировки в прямолинейном полете с остановленным двигателем: 1) без крена, 2) без скольжения, а также рекомендацию фирмы Боинг.
1. Полет без крена.
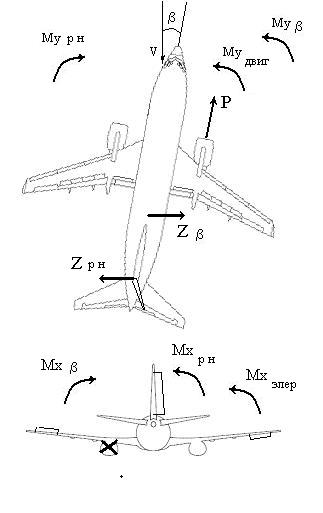
Чтобы балансировать без крена, нужно создать горку на левом крыле. Тогда к моменту от несимметричной тяги Му двиг прибавится момент от скольжения Му b . Их уравновешивание требует большого отклонения руля направления. Боковые силы руля направления Z рн и скольжения Z b будут действовать в противоположных направлениях и при определенном угле скольжения будут уравновешены. Поперечный момент Мх b будет компенсироваться моментами руля направления Мх рн и элеронов Мх eler.
Казалось бы, прямой полет без крена является наиболее приемлемым для пилота, но из-за необходимого большого угла отклонения руля направления увеличивается лобовое сопротивление самолета. Это ухудшает возможности самолета, особенно когда двигатель выходит из строя на взлете с большой массой и при высоких температурах.
Устройство и работа рулевого управления
... классификация рулевого управления Рулевое управление используется для изменения направления движения автомобиля путем поворота передних рулевых колес. Оно состоит из рулевого механизма и рулевого привода. На тяжелых грузовиках в системе рулевого управления используется гидроусилитель руля, который облегчает управление ...
Обратите внимание, что хотя полет здесь скользит, шарик индикатора скольжения будет расположен точно по центру. Дело в том, что аэродинамические силы в этом случае лежат в плоскости симметрии плоскости. В целом это прибор не индикатор скольжения, а индикатор боковой перегрузки. Боковая перегрузка возникает из-за некомпенсированной аэродинамической силы Z, которая уравновешивается боковой составляющей силы тяжести G *, возникающей при полете с креном или центробежной силой при повороте самолета.
2. Полет без скольжения.
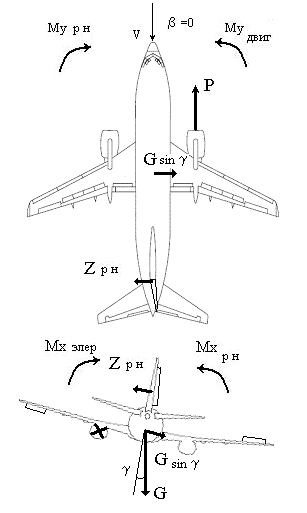
Разворачивающий момент от двигателя Му двиг балансируется моментом от руля направления Му рн. Боковая сила Z ph уравновешивается боковой составляющей силы тяжести G * sing при создании крена на правом крыле. Боковой момент руля направления Мх рн уравновешивается моментом элеронов Мх eler. Обратите внимание на отклонение элеронов в противоположную сторону от баланса без крена. В этом случае мяч будет отклонен в сторону опущенного крыла, даже если проскальзывания не будет.
Этот режим балансировки наиболее выгоден для авиационной энергетики, так как обеспечивается минимальное сопротивление. Но точное выдерживание режима проблематично. Во-первых, у пилотов нет индикации угла скольжения, во-вторых, при изменении тяги работающего двигателя меняется разворачивающий момент, значит меняется потребное отклонение руля направления, соответственно меняется боковая сила руля направления, а значит и требуемый угол крена для его компенсации. В руководствах по летной эксплуатации советских самолетов летчики давали примерную цифру 3-5 градусов при работающем двигателе.
Боинг дает другой критерий управления. Рассмотрим балансировочную диаграмму при отказе левого двигателя.
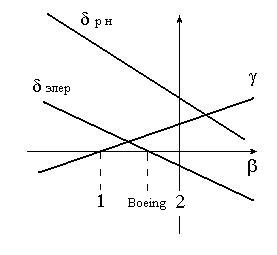
На нем цифрами 1 и 2 показаны рассмотренные случаи балансировки без качения и противоскольжения. Однако существует бесконечное количество других позиций баланса. Боинг рекомендует пилотам балансировать самолет с нулевым отклонением элеронов (level the control wheel).
написано, что в этом случае происходит небольшой крен в сторону работающего двигателя, и мяч слегка отклоняется в том же направлении. Как видно из диаграммы балансировки, это положение находится где-то между двумя рассматриваемыми случаями балансировки. его удобно держать в руке, потому что для проверки «горизонтального» положения руля даже не нужно смотреть в кабину, а правильность положения руля направления можно проверить по тактильным ощущениям руки. Какая половина рулевого колеса опущена, означает, что педали необходимо отклонить в одном направлении для баланса. Точно такая же техника пилотирования при включенном автопилоте, поскольку педали автопилота не управляются.
Отказобезопасность
Безопасность при отказе означает анализ влияния отказов на поведение воздушного судна и способность безопасно завершить полет.
При расследовании катастрофы 3 марта 1991 года NTSB оценил требуемые отклонения штурвала по крену для парирования следующих неисправностей системы управления:
1. Секция выдвижного предкрылка или предкрылок Крюгера не выпустились. В неспокойной обстановке этот сбой, скорее всего, останется незамеченным.
2. Отказ демпфера рысканья с уводом руля направления на 2 градуса. (Максимальный угол отклонения руля направления от демпфера рысканья на сериях (300-500) — 3 градуса).
Парирование требует отклонения штурвала на 20 градусов.
3. «Всплывание» интерцептора-элерона.
(Опущенный интерцептор удерживается в полете гидросистемой. В случае отказа системы удержания перехватчика из-за вакуума над крылом он может подняться над поверхностью крыла. Это называется «всплыванием».)
Парирование такого отказа требует отклонения штурвала на 25 градусов.
4. Заедание катушки руля направления, что привело к отклонению руля направления на 10,5 градусов. Требует отклонения штурвала на 40 градусов.
5. Чтобы парировать асимметричную тягу двигателей с наклоном руля на 8 градусов, требуется угол наклона руля на 30 градусов.
Общий вывод заключался в том, что эти отказы не могут быть причиной потери управляемости самолета.
Недостатки самолета
С точки зрения вопросов, касающихся аэродинамики самолет имеет следующие недостатки:
1. Несмотря на то, что самолет оборудован флюгарками, информация о текущем угле атаки пилотам не выдается (за исключением некоторых комплектаций самолетов серий 600 и далее).
Подача такой информации значительно бы помогла в случаях ненадежной работы компьютера высотно-скоростных параметров, ошибочного ввода информации о весе самолета в навигационный компьютер (FMC), выводе самолета из сложного положения, заходе на посадку с различными отказами механизации и т. п.
2. В законе управления двигателем нет прямого ограничения скорости двигателя при достижении максимально допустимой температуры газов за турбиной. Поэтому по мере увеличения скорости при взлете температура газов за турбиной непрерывно повышается, а при взлете в жаркое время года с большой взлетной массой может превышать максимально допустимое значение. Это накладывает дополнительную нагрузку на экипаж по дополнительному управлению и ручной настройке режима двигателя во время разбега и начального набора высоты. Что не способствует безопасности полета.
3. Самолет имеет чрезмерную боковую устойчивость, особенно при выпущенных закрылках. Это затрудняет его управление и вызывает неудобства для пассажиров при взлете и посадке в порыве бокового ветра и при полете в турбулентной атмосфере.
Примером может служить авария с Боингом 737-500 авиакомпании «Международные авиалинии Украины» 13 февраля 2008 года.
Выполняя посадку в Хельсинки при сильном порывистом боковом ветре, командир экипажа чрезмерно энергично парируя крен, возникший от порыва ветра, допустил касание законцовкой крыла о ВПП.
На самолётах модификации NG с winglet данный недостаток ещё более усилился.
По той же причине самолет резко реагирует креном на возникающую пробуксовку при отказе двигателя при взлете. При этом полного отклонения штурвала по крену не достаточно для парирования кренящего момента и необходимо без задержки отклонить руль направления для парирования возникающего скольжения. В условиях видимости естественного горизонта эта задача решается, как правило, без проблем. Но в облаках или при ограниченной видимости решение этой задачи требует специальной тренировки и достаточно непросто для пилотов привыкших пилотировать по советской системе индикации – вид с земли на самолет.
4. Согласно отчета AAIB (Air Accidents Investigation Branch) о расследовании инцидента с Боингом 737-300 авиакомпании Thomsonfly, произошедшего в Bournemouth (Великобритания) 23 сентября 2007 года, полного отклонения руля высоты не хватило для парирования кабрирующего момента от двигателей. Выводя самолет из режима сваливания, экипаж вывел двигатели на режим, превышающий полную взлетную мощность. При этом тангаж самолета увеличился до 44 градусов, несмотря на то, что командир полностью отклонил штурвальную колонку от себя. В данном случае необходима помощь стабилизатора.
5. На самолётах модификации NG крейсерское число М полёта увеличилось и вплотную приблизилось к M MO . Однако повышенная инертность самолёта (за счёт большей массы) и алгоритм работы автомата тяги таковы, что возникает реальная угроза непреднамеренного превышения M MO в крейсерском полёте в неспокойной атмосфере при усилении встречной составляющей скорости ветра.
6. Сервокомпенсатор руля высоты (elevator tab), предназначенный для уменьшения усилий на штурвале при прямом (безбустерном) управлении самолётом, может провоцировать автоколебания проводки управления. Данные случаи отмечались 1 марта 2010 года http://aviacom.ucoz.ru/publ/boeing_737/nedavnie_incidenty_s_boingom_737/1_marta_2010_goda_brjussel/8-1-0-17
http://aviacom.ucoz.ru/publ/boeing_737/nedavnie_incidenty_s_boingom_737/povtornaja_proverka_servokompensatorov/8-1-0-15 .
Также вибрация сервокомпенсатора рассматривается, как одна из возможных причин катастрофы Боинга 737-800 в Бейруте 25 января 2010 года
В первых автопилотах канал курса стабилизирует курс самолета автоматически, отклоняя руль направления пропорционально отклонению текущего курса от заданного:
δ н = к 1 (ψ з — ψ) + к 2 dψ/dt, (6.3)
где δ н — угол отклонения руля направления;
- ψ з, ψ — заданное и текущее значение курса;
- dψ/dt = ω y — угловая скорость самолёта относительно оси Y (из датчика угловой скорости относительно вертикальной оси ДУС).
Чаще при развороте самолета на заданный курс управление осуществляет канал крена, потому что аэродинамика самолета такова, что при кренах самолёта происходит разворот его по курсу. Заданный курс устанавливается на задатчике курса (например ЗК-2, входящего в состав гирополукомпаса см. рис. 6.4).
В задатчике курса формируется сигнал (ψ з — ψ) отклонения заданного курса ψ з, установленного кремальерой от текущего ψ, измеряемого гиродатчиком. В этом случае сигнал задатчика курса является основой для формирования управляющего сигнала для отклонения элеронов.

Рисунок 6.4 Лицевая часть задатчика курса ЗК-2
На самолетах, в которых имеется прибор навигационный плановый ПНП (см. рис. 6.5) и допплеровский измеритель путевой скорости и угла сноса ДИСС, пилот может устанавливать заданный курс левой кремальерой с учетом угла сноса.
Рис. 6.5 Прибор навигационный плановый
В самолетах с электронными индикаторами заданный курс устанавливается ручкой HDG на пульте управления САУ и отображается на навигационном индикаторе и на пульте управления САУ.

Рис. 6.6 Задатчик и индикатор курса (HDG) на пульте управления САУ B-737

Рис. 6.6 Задатчик и индикатор курса (HDG) на пульте управления САУ А-320
Демпфер рыскания
Большая часть современных пассажирских самолётов имеет систему автоматического управления, в которой канал руля направления не управляет курсом самолёта, а лишь гасит колебания самолёта относительно вертикальной оси по углу рысканья, то есть канал направления является «чистым демпфером». Руль направления или отдельная его часть отклоняется рулевым агрегатом с помощью сигнала угловой скорости разворота самолета относительно вертикальной оси ω у = dψ/dt, поступающего с датчика угловых скоростей, и сигнала перегрузки n z , с датчика линейных ускорений. Закон управления имеет вид:
Канал направления может начать работать в качестве демпфера колебаний раньше, чем происходит включение САУ в режим автопилота «АП». Это может быть перед взлётом, который осуществляется в штурвальном режиме. Руль направления при этом управляется автономным демпфером рысканья (АДР, YD), который помогает пилоту управлять самолётом, подавляя раскачку колебаний по углу рысканья.
Лекция 7
7.1 Обеспечение устойчивости и управляемости самолёта при автоматическом полёте
Автопилоты, как правило, начинают работать после взлёта на высоте порядка 300 метров и отключаются перед заходом на посадку. Автопилоты отключаются также в случае отказа двигателя, болтанки, других сложных условиях. Это обусловлено тем, что автопилот не обеспечивает в этих режимах достаточного уровня устойчивости, управляемости и надёжности.
Развитие автопилотов и превращение их в системы автоматического управления связано с появлением режимов траекторного управления и автоматического захода на посадку. Для обеспечения этих режимов приняты дополнительные меры для повышения запаса устойчивости и управляемости самолёта и как следствие безопасности автоматического полёта на всех его стадиях. Эти меры в первую очередь сводятся к совершенствованию законов управления в режиме «АП» путём введения дополнительных сигналов для управления.
Реакция самолета на ступенчатое отклонение органов управления в продольном короткопериодическом движении была рассмотрена в разделе 3,3.2. Посмотрим, как изменится эта реакция, если в проводку управления самолета включен демпфер тангажа. Маневр самолета в продольной, плоскости совершается энергичным отклонением колонки штурвала на величину Дхв, при этом закон изменения Д§ = к ш. в Дх в близок к ступенчатому, т. е. Ах в (1) = 1 (I) Дхв и Ах в (р) = Ах в.
Рассмотрим реакцию самолета с демпфером тангажа на ступенчатое отклонение пилотом колонки штурвала. На этапе короткопериодического движения сформируются новые значения угловой скорости тангажа, угла атаки и нормальной перегрузки:
(Дсо2)уст = Нт {рДхв(р)^(р)} = р-О
0. (6.49) Получим матрицу передаточных функций замкнутой системы «самолет-демпфер тангажа» по параметрам продольного короткопериодического движения на внешние возмущения
где переходная матрица определена выражением (6.23).
6.2. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
ПО КРЕНУ
6.2.1. Демпферы крена Устройство и работа. Необходимость демпфирования колебаний по крену возникает при непроизвольном отклонении самолета от исходного режима под действием внешних возмущений или при маневре в горизонтальной плоскости. Если самолет обладает недостаточной степенью поперечной статической устойчивости по скорости крена, а также проявляется колебательность движения самолета по крену, необходимо обеспечить принудительное демпфирование. В режиме ручного (штурвального) управления пилот наблюдает за изменением угла крена по указателю авиагоризонта и воздействует на штурвал при возникновении колебаний таким образом, чтобы отклонение элеронов противодействовало этим колебаниям. Для освобождения пилота от решения этой задачи служат демпферы крена.
Демпфер крена (ДК) — средство автоматического управления, обеспечивающее демпфирование колебаний самолета по крену на всех этапах полета путем отклонения элеронов при возникновении угловой скорости крена.
Простейший демпфер крена реализует следующий закон управления элеронами:
Л5?»-кШхох; (6.51);
- где Д5″- автоматическое отклонение элеронов демпфером крена от балансировочного положения; кщ -передаточный коэффициент по угловой скорости крена, показывающий, на каксШ угол должны отклониться элероны при изменении угловой скорости крена на Г/с (1 рад/с).
Другими словами, отклонение элеронов демпфером крена пропорционально угловой скорости крена.
Демпферы крена используют на самолетах с бустерной или электродистанционной системой управления элеронами. Их рулевые агрегаты включают в проводку управления по последовательной схеме, тогда общее отклонение элеронов от балансировочного положения А8Э равно сумме ручного отклонения элеронов пилотом посредством баранки штурвала Д8* и автоматического отклонения демпфером крена:
Д5Э = Д5? + Дб»». (6.52) Функциональная схема аналогового демпфера крена аналогична схеме демпфера тангажа (рис. 6.6).
Отклонение элеронов А8^ создается пилотом путем перемещения баранки штурвала (БШ) на величину Ах, от балансировочного положения. С помощью дифференциальной качалки осуществляется суммирование этого сигнала с управляющим сигналом демпфера крена Д8^ к. Рулевой привод элеронов РП8Э формирует отклонение элеронов.
Работа демпфера крена аналогична работе демпфера тангажа, с той разницей, что при возникновении угловой скорости крена ю, датчик ДУС вырабатывает электрический сигнал им, пропорциональный этой скорости.
Вычислитель В вырабатывает управляющий сигнал ив согласно закону управления (6.47).
Сервопривод преобразует этот сигнал в перемещение штока рулевого агрегата элеронов А8 *».
Влияние демпферов крена на поперечную устойчивость и управляемость.
Покажем, что с помощью демпфера крена улучшается степень поперечной статической устойчивости самолета т™». При отклонении элеронов демпфером появляется приращение коэффициента момента крена
МЗ Рис. 6.6. Функциональная схема аналогового демпфера крена Рис. 6.7. Переходные процессы в контуре угловой скорости крена и угла крена при отклонении пилотом элеронов:
- а-свободный самолет; б-при включенном демпфере крена Убедимся в том, что с помощью демпфера крена улучшается динамическая устойчивость бокового движения.
На рис. 6.7 показаны переходные процессы, возникающие в результате ступенчатого отклонения пилотом элеронов на угол Д5 *. Демпфер крена уменьшает постоянную времени по угловой скорости крена Т™ Т Юх. Однако так как отклонение элеронов демпфером А5,» вычитается из отклонения элеронов пилотом Лб, общее отклонение элеронов А5Э становится меньше. Это приводит к уменьшению установившегося значения угловой скорости крена (со?к)Уст по сравнению с управлением без демпфера, т. е. эффективность управления элеронами от штурвала уменьшается. Это является основным недостатком демпфера крена.
Управление элеронами пропорционально угловому ускорению крена оЬх в демпферах крена распространения не получило. Это объясняется тем, что такой демпфер крена, увеличивая эффективность поперечного управления, уменьшает демпфирование боковых колебаний.
6.2.2. Моделирование демпфирования колебаний по крену
Подставим уравнения выхода (6.64) и входа (6.65), а также законы управления (6.66) и (6.67) в уравнение состояния (6.63) и выполним преобразование Лапласа при нулевых начальных условиях:
(р! — А^ — В?6 В6Д|)У66(р) = В^ В?6 АХ Э (р).
(6.69) Получим вектор передаточных функций системы «самолет-демпфер крена» в быстром боковом движении самолета по угловой скорости и углу крена на отклонение пилотом штурвала при включенном демпфере крена
(6.72) Переходная матрица состояния (6.73) Определитель матрицы
Таким образом, демпфер крена уменьшает постоянную времени по угловой скорости крена Тт Т ш, но вместе с этим и коэффициент 8ДК и усиления 1ст» 1с.ш3. На рис. 6.8 представлена структурная схема замкнутой системы «самолет — демпфер крена». Сворачивая эту схему, можно получить передаточную функцию (6.76).
Анализ этих передаточных функций показывает, что демпфер крена с законом управления (6.51) не влияет на их структуру, а лишь изменяет характеристики образующих звеньев.
Маневр самолета в боковой плоскости осуществляется энергичным отклонением пилотом штурвала на величину А х э. При этом закон изменения А53 = к ш э Ах э близок к ступенчатому, т.е. Ахэ(1) = 1 (1)Ахэ и Ах э (р) = = Ах э /р. На этапе быстрого бокового кренового движения произойдет формирование нового установившегося значения угловой скорости крена
Рис. 6.8. Структурная схема замкнутой системы «самолет-демпфер крена»
Перейдем от изображения Асох(р) к оригиналу:
Время переходного процесса 1йк, по истечении которого отличие угловой скорости крена от установившегося значения будет равно 5%, опредед./тда ляется из условия е » 7 » = 0,05. Отсюда 1ЙК — -1пО,05Т^ ^ ЗТ^. Таким образом, включение демпфера крена в проводку управления эл»еронами приводит к уменьшению времени переходного процесса, однако снижет эффективность поперечного управления.
6.3. АВТОМАТИЧЕСКОЕ ДЕМПФИРОВАНИЕ КОЛЕБАНИЙ
ПО РЫСКАНИЮ
Рис. 6.9. Функциональная схема аналогового демпфера рыскания чивость самолета неудовлетворительна. Исполнительные устройства сервоприводов демпферов рыскания-рулевые агрегаты включаются в механическую проводку управления по последовательной схеме. Поэтому общее отклонение руля направления от балансировочного положения А8 Н равно сумме ручного отклонения руля направления пилотом посредством педалей
А5 Р и автоматического отклонения руля направления демпфером рыскания:
А5„ = А5 р + А62 р. (6.84) Функциональная схема аналогового демпфера рыскания аналогична функциональным схемам демпферов тангажа и крена (рис. 6.9).
Отклонение Р руля направления Д8 создается пилотом путем перемещения педалей П на величину Ах н от балансировочного положения. С помощью дифференциальной качалки осуществляется суммирование этого сигнала с управляющим сигналом демпфера рыскания Л5* р. Рулевой привод руля направления РПЬЯ формирует отклонение руля направления.
Рис. 6.10. Переходные процессы в контуре угловой скорости рыскания при отклонении пилотом руля направления:
а-свободный самолет; б-при включенном демпфере рыскания При возникновении угловой скорости рыскания соу датчик ДУС вырабатывает электрический сигнал и ш, пропорциональный этой скорости. Вычислитель В вырабатывает управляющий сигнал и в согласно закону управления (6.83) на вход сумматора С сервопривода руля направления С/75Н.
Сервопривод преобразует этот сигнал в перемещение штока рулевого агрегата руля направления А82 Р.
Влияние демпферов рыскания на путевую устойчивость и управляемость.
Покажем, что с помощью демпфера рыскания улучшается степень путевой т
|(ту»Г||т^|, (6-88) т.е. степень путевой статической устойчивости самолета с демфером рыскания выше, чем степень собственной путевой статической устойчивости самолета.
Покажем, что с помощью демпфера рыскания улучшается динамическая устойчивость бокового движения. На рис. 6.10, а представлены переходные процессы, возникающие в результате ступенчатого отклонения пилотом руля направления на угол А5Ц. Как видно из графиков рис. 6.10, б, демпфер рыскания уменьшает колебательность переходных процессов по угловой скорости и углу рыскания — уменьшаются период короткопериодических колебаний и время затухания. Так как отклонение руля направления демпфером Д8^р вычитается из отклонения руля направления пилотом А8 Р, общее отклонение руля направления А5 Н становится меньше. Это приводит к уменьшению установившегося значения угловой скорости рыскания р оу уст по сравнению с управлением без демпфера, т. е. эффективность управления рулем направления от педалей уменьшается.
Особенности законов управления демпферов рыскания. Разновидностями демпферов рыскания являются демпферы, реализующие следующие законы управления:
А5^ = Цю у = к й у рсо у, (6.89)
РИС. 6.11. Структурная схема демпфера рыскания АБСУ-154 В законе управления (6.89) управляющий параметр-угловое ускорение рыскания юу, получаемое дифференцированием в ДУС сигнала ю у. Изодромный фильтр Т Л р/(Т й р + 1) закона управления (6.90) реализуется в вычислителе блока «демпфера, например, с помощью КС-цепочки.
Законы управления демпферов рыскания (6.89) и (6.90) позволяют уменьшить неблагоприятное влияние демпфера рыскания на путевую управляемость. Это достигается возвращением штока рулевого агрегата в нейтральное положение, когда Ьу = 0, т.е. Д8Ц Р = 0 при со^руст = сопз1.
Поэтому противодействие демпфера пилоту прекращается и расход перемещения педалей для создания угловой скорости не изменяется. При этом, естественно, ухудшаются характеристики устойчивости.
Кроме уменьшения неблагоприятного влияния на путевую управляемость демпферы рыскания с законом управления (6.89) и (6.90) устраняют негативные последствия взаимосвязи движений по рысканию и крену. Так, в установившемся развороте с креном демпфер рыскания с законом управления (6.83) противодействует развороту отклонением руля направления при возникновении угловой скорости ю у. Фильтрация постоянной
Рис. 6.12. Структурная схема демпфера рыскания АСУУ-86
составляющей этой скорости законами управления (6.89) и (6.90) позволяет держать руль направления в нейтрали при совершении разворота и реагировать лишь на колебательность углового движения относительно постоянной составляющей скорости разворота.
Для дополнительного демпфирования самолета при заходе на посадку, когда скорость самолету мала и эффективность руля направления снижается, в закон управления (6.52) включается дополнительный демпфирующий сигнал, пропорциональный угловой скорости рыскания, (6.91) где Р азп принимает значение, равное 1 при включении режима автоматического захода на посадку (АЗП) и 0 во всех остальных режимах.
Структурная схема демпфера рыскания, реализующего закон управления (6.91), представлена на рис. 6.11. Таким образом осуществляется демпфирование колебаний по рысканию с помощью системы АБСУ-154.
На малых скоростях полета требуется дополнительное демпфирование самолета по рысканию при вхождении самолета в крен и при отклонении элеронов. Тогда в закон управления (6.90) включаются дополнительные сигналы, пропорциональные углу крена и углу отклонения элеронов, пропущенные через изодромные фильтры с постоянными времени Т^, и Т ^:
где Р,ак принимает значение, равное 1 при выпуске закрылков на угол 30° и 0 при убранных закрылках.
Датчиком сигнала, пропорционального углу крена, служит гировертикаль ГВ. Датчиком сигнала, пропорционального углу отклонения элеронов, служит датчик обратной связи рулевой машины автопилота. Датчиком выпуска закрылков является концевой выключатель КВ8ЫК.
Структурная схема демпфера рыскания, реализующего закон управления (6.92), представлена на рис. 6.12. Таким образом осуществляется демпфирование колебаний по рысканию с помощью системы АССУ-86.
Основной характеристикой боковой устойчивости самолета является степень путевой статической устойчивости по углу скольжения т§. Для ее увеличения и демпфирования боковых колебаний самолета в демпфере рыскания необходимо использовать сигнал, пропорциональный угловой скорости скольжения р\ Однако создание датчиков такого сигнала затруднено, поэтому используют следующую упрощенную зависимость угловой скорости скольжения $ от угловых скоростей рыскания и крена в горизонтальном полете с постоянным углом атаки а 0:
Рис. 6.13. Структурная схема демпфера рыскания ДР-62 Следовательно, для эффективного демпфирования колебаний самолета по углу скольжения необходимо в демпфере рыскания помимо сигнала, пропорционального угловой скорости рыскания, вводить сигнал, пропор* циональный угловой скорости крена. Тогда закон управления принимает следующий вид:
(6.94) где ^^ = Таким образом, анализ одного из простейших средств автоматизации бокового движения самолета показывает необходимость учета взаимодействия движений рыскания и крена.
Так как сигналы с ДУС, пропорционльные угловым скоростям, содержат помехи, то для их фильтрации применяется апериодический фильтр с постоянной времени Тф = 0,1 -=- 0,2 с.
Закон управления имеет вид + (6.95) ТШ„Р + 1 Передаточный коэффициент 1сш корректируется по положению закрылков (принимает большее значение при выпущенных закрылках и уменьшается при убранных).
Структурная схема демпфера рыскания, реализующего закон управления (6.95), представлена на рис. 6.13. Так осуществляется демпфирование колебаний по рысканию с помощью демпфера рыскания ДР-62.
6.3.2. Моделирование демпфирования колебанийпо рысканию
Рассмотрим модель быстрого бокового движения «чистого рыскания»
по угловой скорости рыскания и углу скольжения (4.23) при наличии управляющих воздействий пилота на педали и включенном демпфере рыскания. Модель содержит уравнение состояния, уравнения выхода и входа, закон управления рулем направления ручного контура и закон управления рулем направления ручного контура и закон управления демпфера рыскания:
Х 66 (1) = А д д Х д ^ Г) + В ^ Ц ^, (6.96)
На рис. 6.14 представлена структурная схема замкнутой системы «самолет-демпфер рыскания». Сворачивая эту схему, можно получить передаточную функцию (6.112).
Таким образом, демпфер рыскания с законом управления (6.83) не влияет на вид передаточных функций, но изменяет характеристики образующих их звеньев. Анализ выражений (6.114)-(6.118) показывает, что демпфер рыскания положительно влияет на характеристики колебательного звена передаточных функций. Постоянная времени Тр р уменьшается, частота собственных колебаний Юрр и относительный коэффициент затухания ^рр увеличиваются. Однако при этом уменьшаются коэффициенты усиления к » и к «.
д,„, р Для снижения негативного влияния демпфера рыскания на путевую управляемость сигнал угловой скорости соу в законе управления (6.90) пропускается через изодромный фильтр.
Рассмотрим работу демпфера рыскания с изодромным законом управления (6.90) по демпфированию колебаний различной частоты. Передаточная функция демпфера имеет вид
т. е. при высокочастотных колебаниях демпфер рыскания отклоняет руль направления пропорционально угловой скорости рыскания, что от него и требуется. При малых частотах колебаний демпфер рыскания начинает работать как дифференцирующее звено, так как при со -» О
Ч 1 -Когда (о -» 0, а юу -» сош1 и юу -» 0, выходной сигнал изодромного фильтра и управляющий сигнал демпфера рыскания будут стремиться к нулю. В результате при развороте с постоянной скоростью демпфер рыскания воздействовать на руль направления не будет.
Довороты самолета в боковой плоскости, а также устранение скольжения осуществляются энергичным отклонением пилотом педалей на величину А х н. При этом закон отклонения руля направления А5 Н = к ш. н Ах н близок к ступенчатому. На этапе быстрого бокового движения происходит формирование нового установившегося значения угловой скорости рыскания:
Выражение (6.127) определяет переходный процесс в боковом короткопериодическом колебательном движении самолета с демпфером рыскания при отклонении педалей пилотом. Анализ выражения (6.127) показывает, что оно аналогично выражению (6.43) для нормальной перегрузки. Динамические характеристики боковой устойчивости и управляемости определяются аналогично (6.44).
Таким образом, включение демпфера рыскания в проводку управления рулем направления приводит к уменьшению колебательности процесса управления, однако снижает эффективность путевого управления от педалей.
Глава 7АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ УСТОЙЧИВОСТИИ УПРАВЛЯЕМОСТИ
Если самолет обладает неудовлетворительными характеристиками устойчивости и управляемости или эти характеристики существенно меняются по режимам полета, возникает задача их улучшения с помощью соответствующих автоматических средств.
В качестве средств автоматического улучшения устойчивости самолета применяют автоматы устойчивости, среди которых различают автоматы продольной устойчивости и автоматы боковой устойчивости. Их общей особенностью является отклонение руля при возникновении перегрузок относительно соответствующей связанной оси самолета.
Разделение средств автоматического демпфирования и улучшения устойчивости самолета на автоматы демпфирования и устойчивости достаточно условно, так как демпфирование и устойчивость-взаимосвязанные свойства самолета. Кроме того, на современных самолетах автоматы демпфирования и устойчивости комплексируются в единой системе и работают одновременно и согласованно.
Автоматическое улучшение управляемости самолета осуществляется путем отклонения рулей средствами автоматического управления при воздействии пилота на рычаги управления и изменения параметров короткопериодического движения самолета либо изменением кинематики системы управления рулями по режимам полета. «Благоприятное влияние автоматики на характеристики управляемости проявляется в улучшении качества и обеспечении стабильности переходных процессов выхода самолета на новый режим полета после целенаправленного воздействия пилота на рычаги управления. При этом сохраняются требуемые характеристики демпфирования и устойчивости.
В качестве средств автоматического улучшения управляемости самолета применяют автоматы управления, автоматы регулирования управления и загрузки, автоматы триммирования.
Среди автоматов управления различают автоматы продольного управления и бокового управления. Их общей особенностью является дополнительное к ручному автоматическое отклонение руля при воздействии пилота на рычаги управления. При наличии на самолете бустерной системы управления автоматическое отклонение руля суммируется с ручным отклонением руля посредством механической проводки. При наличии на самолете электродистанционной системы управления автоматическое отклонение руля суммируется с электродистанционным отклонением. Иногда автомат управления сам представляет собой электродистанционную систему управления и берет на себя все ее функции. На современных самолетах автоматы управления комплексируются с автоматами демпфирования и устойчивости в единой системе и работают одновременно и согласованно.
Среди автоматов регулирования управления различают автоматы регулирования продольного, путевого и поперечного управления. Аналогичным образом классифицируют автоматы регулирования загрузки. Общая особенность этих автоматов — обеспечение постоянства статических характеристик управляемости при изменении режимов полета путем воздействия на кинематику механической проводки управления.
7.1. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ УСТОЙЧИВОСТИПО ПЕРЕГРУЗКАМ
Устройство и работа автоматов продольной устойчивости. Автоматы демпфирования не полностью решают проблему улучшения пилотажных свойств самолета, так как компенсируют лишь недостаточное собственное демпфирование самолета. Вследствие действия внешних продольных возмущений, даже при включенном демпфере тангажа, у самолета могут измениться угол атаки и нормальная перегрузка. Поэтому необходимо сохранить исходный режим полета по углу атаки и нормальной перегрузке.
Для освобождения пилота от решения этой задачи служат автоматы продольной устойчивости.
Автомат продольной устойчивости (АПУ)- средство автоматического управления, обеспечивающее повышение устойчивости самолета по углу атаки и нормальной перегрузке на всех этапах полета путем отклонения Руля высоты при возникновении приращения угла атаки или избыточной нормальной перегрузки.
Рис. 7.1. Функциональная схема автомата продольной устойчивости Простейшие автоматы продольной устойчивости реализуют следующие законы управления рулем высоты:
1саДа, (7.1) (7.2) Д6» = к„ Дп„ ПУ где Д8* -отклонение руля высоты автоматом продольной устойчивости; Да = = (а — а0)- приращение угла атаки относительно опорного значения, имевшего место в момент включения автомата; Дпу = (пу — 1)-избыточная нормальная перегрузка; ка-передаточный коэффициент по приращению угла атаки, показывающий, на какой угол должен отклониться руль высоты при изменении угла атаки на 1°;
1сп -передаточный коэффициент по избыточной нормальной перегрузке, показывающий, на какой угол должен отклониться руль высоты при изменении избыточной нормальной перегрузки на единицу.
В связи с недостаточной точностью датчиков угла атаки и необходимостью создания специальных схем для запоминания опорного значения угла атаки закон управления (7.1) большого распространения не получил.
Поэтому обычно используется закон управления (7.2), который часто комплексируется с законом управления демпфера тангажа:
То есть отклонение руля высоты автоматом продольной устойчивости пропорционально угловой скорости тангажа и избыточной нормальной перегрузке.
Благодаря последовательному включению исполнительного устройства автомата в механическую проводку бустерной или электродистанционной системы управления рулем высоты при совместном управлении самолетом пилотом и автоматом полное отклонение руля высоты от балансировочного положения Д5В равно алгебраической сумме Д6В = Д8? + Дбв ПУ В состав автомата продольной устойчивости (рис. 7.1) входят датчик линейного ускорения ДЛУ, датчик угловой скорости ДУС, вычислитель ВАПУ и сервопривод руля высоты СЯ8В. Автомат продольной устойчивости работает следующим образом. При изменении нормальной перегрузки на вход вычислителя В с датчиков ДУС и ДЛУ поступают сигналы иш и ип. Сигнал ип преобразуется в сигнал и4п.
Эти сигналы суммируются согласно закону управления (7.3).
Управляющий сигнал и0 вызывает отработку сервоприводом руля высоты. При ПУ отклонении руля высоты на угол А§„ возникает управляющий аэродинамический момент М.,.3, противоположный по знаку возмущению. Поэтому угловая скорость шг и избыточная нормальная перегрузка начнут уменьшаться, а вместе с ними и сигналы ию с ДУС и и с ДЛУ. Когда угловая скорость тангажа станет равной нулю»Ссо^ = 0), руль высоты все еще будет отклонен автоматом продольной устойчивости благодаря еще имеющемуся сигналу ип с ДЛУ (тогда как демпфер тангажа в этот момент возвращал руль высоты* в балансировочное положение).
Поэтому угловая скорость тангажа саг поменяет знак и избыточная перегрузка Апу начнет интенсивно уменьшаться. Когда сигналы ии и ип уравновесят друг друга, АПУ вернет руль высоты в балансировочное положение. Дальнейшая отработка руля будет вызвана сменой знака суммы сигналов ит и и, что приведет к плавному возвращению самолета к исходной нор»мальной перегрузке.
Влияние автоматов продольной устойчивости на устойчивость и управляемость. Покажем, что с помощью автомата продольной устойчивости повышается степень продольной статической устойчивости по перегрузке.
Влияние демпферной части закона управления (7.3) на характеристики продольной устойчивости и управляемости показано в § 6.1. Рассмотрим влияние составляющей закона управления по избыточной нормальной перегрузке.
При отклонении руля высоты автоматом продольной устойчивости появляется приращение коэффициента момента тангажа Ат2 = т*1 А6*пу = т^-ЦАПу.
перегрузке, который в течение полета меняется в широких пределах. При* этом увеличение запаса устойчивости ухудшает демпфирование. Демпфег»ная часть закона управления (7.3) увеличивает коэффициент демпфирования Ьк и попутно способствует некоторому увеличению частоты собственных колебаний У К. Составляющая закона управления по перегрузке также увеличивает частоту У К. Таким образом, подбором передаточных коэффициентов кЮг и кДп удается снизить запас статической устойчивости по перегрузке, компенсируя смещение фокуса вперед обратной связью по перегрузке.
Другим важным преимуществом автоматов продольной устойчивости является их способность возвращать самолет к исходному режиму полета по нормальной перегрузке. При длительном возмущении появляется статическая ошибка в виде установившегося значения избыточной перегрузки Апу.уст. Поэтому АПУ с законами управления (7.2) и (7.3) называют статическими. Для ликвидации статической ошибки применяют более сложные законы управления, например с интегрированием сигнала с датчика ДЛУ.
Основной недостаток автомата продольной устойчивости уменьшение эффективности управления рулем высоты от колонки штурвала, так как отклонение руля высоты автоматом А6^пу вычитается из отклонения руля высоты пилотом А8§. Это приводит к уменьшению интенсивности вертикального маневра.
Устройство и работа автоматов боковой устойчивости. Демпферы крена и рыскания не могут противодействовать изменению угла скольжения и боковой перегрузки. Поэтому наряду с задачей демпфирования боковых короткопериодических колебаний возникает задача сохранения исходного режима полета по углу скольжения и боковой перегрузке. Особенно это актуально при развороте, когда пилот воздействует на элероны. Для противодействия возникающему при этом скольжению и связанной с ним боковой перегрузке пилот, наблюдая за указателем угла скольжения, отклоняет руль направления. Разворот при этом становится координированным. Для освобождения пилота от решения этой задачи служат автоматы боковой устойчивости.
Рис. 7.2. Переходные процессы в контуре угловой скорости тангажа и нормальной перегрузки при кратковременном внешнем возмущении:
а-свободный самолет; б-при включенном автомате продольной устойчивости Автомат боковой устойчивости (АБУ) -средство автоматического управления, обеспечивающее повышение устойчивости самолета по углу скольжения и боковой перегрузке на всех этапах полета путем отклонения руля направления при возникновении приращения угла скольжения или боковой перегрузки.
Простейшие автоматы боковой устойчивости реализуют следующие законы управления рулем направления:
А5*БУ = к р Ар, (7.4) А5* Б У =-к„п г, (7.5) где Д8*БУ-отклонение руля направления автоматом боковой устойчивости; Д() = = (Р — Ро)- приращение угла скольжения относительно опорного значения; Кр, 1сп-передаточные коэффициенты по приращению угла скольжения и боковой» перегрузке (пг0 = 0).
Невысокие точностные характеристики известных датчиков утла скольжения не позволяют широко применять закон управления (7.4).
Поскольку углы скольжения обычно малы, то боковая перегрузка практически пропорциональна углу скольжения. Так как измерение боковой перегрузки не вызывает затруднений, закон управления (7.5) распространен более широко.
Обычно автомат боковой устойчивости объединяется с демпфером рыскания и имеет закон управления А5*БУ = к ю ш у — к п п г. (7.6) При совместном управлении пилотом и автоматом полное отклонение руля направления от балансировочного положения равно алгебраической сумме БУ Д8„ = А§Р + А5*.
Функциональная схема автомата боковой устойчивости аналогична схеме АПУ. Отличие заключается в том, что датчик угловой скорости ДУС ориентирован по измерительной оси ОУ, а датчик линейных ускорений ДЛУ-по измерительной оси О2. Вычислитель ВАБУ вырабатывает управляющий сигнал иа согласно закону управления (7.6) на основе сигналов иш и и п. Автомат содержит сервопривод руля направления СШН. Работа АбУ аналогична работе АПУ.
Влияние автоматов боковой устойчивости на устойчивость и управляемость. Покажем, что с помощью автомата боковой устойчивости повышается степень путевой статической устойчивости по углу скольжения т,.
Демпферная часть закона управления (7.6) обеспечивает увеличение степени путевой статической устойчивости по угловой скорости рыскания т™».
Рассмотрим влияние составляющей закона управления по боковой перегрузке.
При отклонении руля направления автоматом боковой устойчивости появляется приращение коэффициента момента рыскания Ат у = ту» Д8нБУ = — ту»кп п г.
Известно, что при малых углах скольжения пг = — кПгЛр, где кп -коэффициент пропорциональности. Тогда приращение частной производной коэффициента момента рыскания по углу скольжения
Следовательно, при включенном автомате боковой устойчивости:
Анализ влияния автомата боковой устойчивости на динамические ха-, рактеристики бокового движения аналогичен проведенному анализу для АПУ. Недостатком автомата боковой устойчивости является уменьшение эффективности путевого управления.
Особенности законов управления автоматов продольной и боковой устойчивости. Для обеспечения астатизма управления при длительных внешних Рис. 7.4. Структурная схема автомата боковой устойчивости
Тогда в законе управления (7.8) вместо сигнала угловой скорости соу следует использовать ее производную оу для сохранения демпфирующих свойств автомата (рис. 7.4).
Так обеспечивается улучшение путевой устойчивости с помощью систем САУ-62 и САУ-86.
7.2. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ ПРОДОЛЬНОЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
7.2.1. Автоматы продольного управления Устройство и работа. Демпферы тангажа и автоматы продольной устойчивости обладают одним общим недостатком: снижают эффективность продольного управления самолетом от колонки штурвала. Если к тому же самолет обладает неудовлетворительными характеристиками продольной управляемости, пилоту приходится компенсировать снижение эффективности продольного управления дополнительным отклонением колонки штурвала и руля высоты. Автоматы продольного управления служат для освобождения пилота от решения этой задачи.
Автоматы продольного управления (АПУ)-средства автоматического управления, обеспечивающие улучшение продольной управляемости самолета на всех этапах и во всех режимах полета путем отклонения руля высоты при воздействии пилота на колонку штурвала.
Простейший автомат продольного управления реализует следующий закон управления рулем высоты:
А5*пу = к х Дх в, (7.9) где Д5^ПУ-автоматическое отклонение от балансировочного положения руля высоты автоматом продольного управления; !сх -передаточный коэффициент по отклонению колонки штурвала, показывающий, на какой угол должен отклониться руль высоты при перемещении пилотом колонки штурвала от балансировочного положения на 1 мм; Ахв-отклонение пилотом колонки штурвала.
Последовательное включение исполнительного устройства автомата в механическую проводку бустерной или электродистанционной системы управления рулем высоты позволяет суммировать отклонения руля высоты пилотом и автоматом.
Рассмотрим функциональную схему аналогового автомата продольного управления, включенного в бустерную систему управления (рис. 7.5).
В состав автомата входят датчик угловой скорости тангажа ДУС, датчик линейных ускорений ДЛУ, датчик положения колонки штурвала ДП, вычислитель В и сервопривод руля высоты С778В. Вычислитель и электронная часть сервопривода образуют электронный блок автомата БА в канале руля высоты.
Автомат продольного управления работает следующим образом. При отклонении пилотом колонки штурвала КШ датчик ДП вырабатывает электрический сигнал и Д х, пропорциональный Лх„. Этот сигнал преобразуется в вычислителе В согласно закону управления (7.11) в сигнал и0, который вызывает отработку сервоприводом руля высоты. Полное отклонение руля высоты Д5В равно А8§ + А5вкПУ.
Отклонение руля высоты вызовет появление управляющего аэродинамического момента М28, который изменит угловую скорость тангажа юг и избыточную нормальную перегрузку Дпу. Сигналы, пропорциональные этим параметрам ищ и иДп поступят с датчиков ДУС и ДЛУ на вычислитель и вызовут уменьшение сигнала ив. Тогда сервопривод вернет шток рулевого агрегата в нейтральное положение. В это время угловая скорость тангажа сог и избыточная перегрузка Ап у примут новые установившиеся значения, пропорциональные отклонению руля высоты пилотом с помощью колонки штурвала. При возвращении пилотом колонки штурвала в балансировочное положение все процессы повторяются в обратном порядке.
Влияние автоматов продольного управления на характеристики управляемости самолета. Автоматы демпфирования и устойчивости обладают одним общим недостатком -снижают эффективность ручного управления самолетом, увеличивая градиенты перемещений (х^)дт и усилий (РЦ»)ДТ на колонке штурвала. Поэтому демпферная составляющая кга юг и составляющая перегрузки к п Дп у законов управления (7.10) и (7.11) вызывают тот же эффект. Использование сигнала Ах в в АПУ приводит к увеличению значения коэффициента штурвала в силу того, что А5В = А5 + А5*пу = к ш. в Ах в + кю ю2 + к Пу Ап у + к х Ах в = = 14.вАхв + кт1сог + к„;Апу, где к»ш.в = 1сш.в +)сх_.
Такое увеличение коэффициента штурвала компенсирует уменьшение градиентов перемещения и усилий, так как = (хв*)Дт (ХВ»)АПУ = г г Таким образом, автомат продольного управления позволяет сохранить статические характеристики продольной управляемости в заданных пределах.
Влияние автомата продольного управления на динамические характеристики видно из рис. 7.6. Демпферная часть закона управления автомата обеспечивает уменьшение колебательности короткопериодического движения по угловой скорости тангажа, делая его почти апериодическим.
Составляющая закона управления АПУ, пропорциональная отклонению колонки штурвала Ах в, обеспечивает равенство установившегося значения Рис. 7.6. Переходные процессы в контуре угловой скорости тангажа при ступенчатом отклонении руля высоты:
- °- свободный самолет;
- б-при включенном автомате продольного управления.| Рис. 7.7. Структурная схема автомата продольного управления
где Дх в6ало -постоянное отклонение колонки штурвала, характерное для данного;
- самолета;
- Дх в6ал -отклонение колонки штурвала из нейтрального положения в балансировочное;
- хв»зад-заданный для данного самолета градиент перемещения колонки штурвала на единицу нормальной перегрузки.
Величины Ах„.6ал 0 и \1″зш являются постоянными и реализуются в вычислителе в виде соответствующих опорных напряжений. Для измерения отклонения колонки штурвала из нейтрального положения в балансировочное устанавливают.дополнительный датчик положения (ДП).
Наиболее просто сигнал, пропорциональный Ах„ 6ал, можно получить, измеряя отклонение штока механизма эффекта триммирования. Механизм используется пилотом для снятия усилий с колонки штурвала и ее перемещения в балансировочное положение. Тогда в функциональной схеме рис. 7.5 появляется еще один ДП с электрическим выходом и Дхбая.
Автомат с законом управления (7.12) позволяет сохранить постоянство статических характеристик продольной управляемости самолета в различных режимах полета. Так обеспечивается улучшение продольной устойчивости и управляемости с помощью системы САУ-154 (рис. 7.7).
Пример 7.1.
Рассчитаем характеристики управляемости самолета с автоматом продольного управления, имеющим закон управления (7.12) для исходных данных примеров 3.1, 3.2 и 6.1.
(Х»ОАПУ = ОцХ/О — Ч) = — 145 мм» РВ»)АПУ = (Х^АПУ?*» + Р0 = 214 Н.
В конце полета Дб,.^ = — 8°, Ах в6ал. 0 = — 20 мм, (ХВ»)АПУ = — 126 мм, (Рвп)дпу = 191 Н.
Таким образом, автомат продольного управления существенно снизил разброс значений характеристик управляемости по режимам полета, сделав их практически постоянными. Так, градиент перемещения колонки штурвала теперь меняется от -145мм в начале полета до -126мм в конце полета, а градиент усилий на колонке штурвала меняется от 214 Н в начале полета до 191 Н в конце полета, что практически незаметно для пилота.
Влияние отказов автомата продольного управления на управление продольным движением. Пассивный отказ автомата продольного управления по сигналу Ах в приводит к прекращению отработки руля высоты через контур автоматического управления при воздействии пилота на колонку штурвала. Эффективность продольного управления самолетом падает, градиенты перемещений и усилий на колонке штурвала возрастают.
Полный пассивный отказ автомата, комплексированного с демпфером тангажа, приводит к снижению эффективности демпфирования продольных короткопериодических колебаний и возрастанию эффективности продольного управления.
Активный отказ автомата продольного управления аналогичен активному отказу демпфера тангажа и сопровождается отработкой штока рулевого агрегата на максимальный ход, ограниченный концевыми выключателями. Ограничение хода штока рулевого агрегата АПУ сказывается на эффективности продольного управления, особенно при вертикальном маневре, когда часть рабочей зоны отклонения руля высоты расходуется демпферной составляющей автомата.
Цнфроаналоговые автоматы продольного управления. Ужесточение требований к характеристикам продольной устойчивости и управляемости самолета и, как следствие, усложнение законов управления АПУ привели к необходимости реализации автоматов на цифроаналоговой схемотехнике.
В состав автомата входят датчики положения колонки штурвала ДП, угловой скорости тангажа ДУС и нормальной перегрузки ДЛУ, аналоговый блок управления БУ, цифровой вычислительный блок устойчивости и управляемости БВУУ и рулевой агрегат высоты РАЬЬ (рис. 7.8).
Формирование закона управления осуществляется одновременно в аналоговом вычислителе Б блока управления БУ и цифровом вычислителе БВУУ. При этом аналоговый закон управления реализует функции автомата продольной устойчивости по сигналам нормальной перегрузки и угловой скорости тангажа.
Цифровой закон управления выполняет собственно функции АПУ по сигналам отклонения колонки штурвала, а также сигналам и разовым командам от смежных систем и датчиков. Сигналы с датчиков ДП, ДУС и ДЛУ- напряжения постоянного и переменного тока иДх, иИ1 и иДп. Часть Рис. 7.8. Функциональная схема цифроаналогового автомата продольного управления АСУУ-96 сигналов со смежных датчиков также имеет аналоговую форму. Ряд сигналов со смежных систем поступает в виде последовательного биполярного кода. Разовые команды подаются в виде напряжения постоянного тока 27 В.
Аналоговые сигналы и разовые команды преобразуются в БВУУ к цифровому виду. Управляющее воздействие формируется в цифровом виде с последующим преобразованием в аналоговый сигнал и а ». Этот сигнал подается в блок управления, где суммируется с управляющим сигналом ист. аналогового контура. Сервопривод АПУ СП5В формирует отклонение руля высоты А5^ПУ. В случае отказа цифрового контура продолжает работать аналоговый контур с сохранением основных функций демпфирования колебаний самолета по тангажу и устранения избыточной перегрузки.
Управляющее воздействие АПУ А8в пу суммируется с управляющим воздействием ручного контура А5В электродистанционной системы управления по усилию на колонке штурвала.
В обобщенном видб закон управления такого АПУ выглядит следующим образом:
АНУПС СТ = Составляющая закона управления по угловой скорости тангажа а™» обеспечивает демпфирование колебаний самолета по тангажу. Составляющая закона управления по избыточной нормальной перегрузке аЛп улучшает продольную устойчивость самолета. Составляющая закона управления по отклонению колонки штурвала а**» улучшает продольную управляемость самолета, причем передаточный коэффициент 1сх корректируется по углу отклонения стабилизатора ф, а сигнал Дх„ пропускается через апериодический фильтр с постоянной времени Тх.
Составляющая закона управления по приращению угла атаки аЛа обеспечивает улучшение продольной устойчивости и ограничение угла атаки при убранных закрылках. Требуемое значение угла атаки а0 корректируется по числу М. Передаточный коэффициент корректируется по разности Да = а — а0 и числу М.
Составляющая закона управления ст» обеспечивает ограничение скорости полета самолета путем дополнительного отклонения руля высоты при изменении числа М при убранных закрылках.
При включении автомата непосредственного управления подъемной силой (АНУПС) формируется составляющая закона управления аАНУПС, которая корректируется по отклонению колонки штурвала, избыточной перегрузке, приращению угла атаки и управляющему воздействию вычислительной системы управления полетом.
Назначение и особенности формирования этой составляющей будут рассмотрены в гл. 8.
При включении системы активного демпфирования (САД) формируется составляющая закона управления а^Д, которая корректируется по избыточной нормальной перегрузке. Назначение и особенности формирования этой составляющей будут рассмотрены в гл. 8.
Так обеспечивается улучшение устойчивости и управляемости продольного движения с помощью системы АСУУ-96 (рис. 7.9).
Распространен также вариант реализации цифроаналогового АПУ (рис. 7.10) без суммирования управляющих воздействий аналогового и цифрового контуров.
Отличие этой схемы заключается в том, что основным контуром управления является цифровой. Аналоговый автоматический контур, а также ручной контуры подключаются к сервоприводу электродистанционной системы управления только при отказе цифрового контура. Контроль и коммутация производятся в аналоговых блоках управления и контроля (БУК).
Рис. 7.9. Структурная схема цифроаналогового автомата продольного управления АСУУ-96
те. 7.11. Структурная схема цифроаналогового автомата про^ ольного управления СШУ-204
В обобщенном виде закон управления такого А!1У выглядит следуюим образом:
Так обеспечивается улучшение устойчивости и управляемости с помощью системы АСШУ-204 (рис. 7.11).
7.2.2. Моделирование улучшения продольной устойчивости и управляемости Реакция самолета на управляющие воздействия пилота при включенном автомате продольного управления. Рассмотрим модель продольного короткопериодического движения самолета по угловой скорости тангажа, углам тангажа и атаки (3.19) при наличии управляющих воздействий пилота на колонку штурвала и включенном автомате продольного управления. Мо-;
- дель содержит уравнения состояния, выхода и входа, закон управления рулем высоты ручного контура и закон управления простейшего автомата продольного управления (7.9):
(7.17} (7.18* (7.19)
(7.23) Сравнивая передаточные функции (7.21) -(7.23) с передаточными функциями самолета без автоматики, приведенными в табл. 3.1, приходим к выводу, что их структура не изменилась. Специфика включения автомата продольного управления с законом управления (7.9) проявляется лишь в изменении коэффициентов усиления, Проведем аналогичные исследования, если автомат продольной управляемости имеет закон управления (7.10).
Тогда в модели (7. 15) -(7. 19) вместо (7.19) получим У пу (г) = О^Л У пк (I) + В^ Ах„, (7.24)
Вектор передаточных функций имеет вид:
где Ф*ПУ(Р) = (р! — Ам — В;к — ВИЯ*)»1 = (Ф(Р)Г1 Переходная матрица состояния где ФП»У(Р)}ПР-присоединенная матрица.
Определитель имеет вид
(7.25) „АПУ (7.26) „АПУ + (7.27) (ТГР2
(7.28) АПУ Г
М +Р + (7.29) +
Анализ передаточных функций показывает, что АПУ не влияет на их структуру, но изменяет характеристики образующих звеньев. Выбором передаточных коэффициентов 1ст и кп удается обеспечить требуемые значения времени, относительного коэффициента затухания и частоты продольных короткопериодических колебаний. Выбором передаточного коэффициента кх удается сохранить требуемые коэффициенты усиления самолета и снизить негативное воздействие на эффективность продольного управления демпферной составляющей и составляющей перегрузки закона управления (рис. 7.12).
\ Маневры самолета в продольной плоскости осуществляются пилотом энергичным отклонением колонки штурвала. На этапе короткопериодического движения происходит формирование новых значений угловой скорости тангажа, утла атаки и нормальной перегрузки:
(7.33) Выражение (7.33) определяет переходный процесс в продольном короткопериодическом колебательном движении самолета при отклонении пилотом колонки штурвала и включенном автомате продольного управления.
7.3. АВТОМАТИЧЕСКОЕ УЛУЧШЕНИЕ БОКОВОЙ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ
7.3.1. Автоматы бокового управления Устройство и работа. Демпферы крена и рыскания, автоматы боковой устойчивости снижают эффективность путевого и поперечного управления.
Пилоту приходится компенсировать эти недостатки дополнительным воздействием на штурвал и педали. Автоматы бокового управления служат для освобождения пилота от решения этой задачи.
Автоматы бокового управления (АБУ)- ере детва автоматического управления, обеспечивающие улучшение путевой управляемости самолета, на всех этапах и во всех режимах полета путем отклонения руля направления при воздействии пилота на педали или улучшение поперечной управляемости самолета отклонением элеронов при воздействии пилота на штурвал.
Простейшие автоматы бокового управления реализуют следующие законы управления рулем направления и элеронами:
- к Х и Дх н, (7.34) дХэ, (7.35) К)1 где Д5^БУ, Д8^БУ- автоматические отклонения от балансировочного положения соответственно руля направления и элеронов автоматом бокового управления;
- 1сх, к х -передаточные коэффициенты соответственно по отклонению педалей и штурвала, показывающие, на какой угол должны отклоняться руль направления или элероны при перемещении пилотом педалей или штурвала на 1 мм.
Обычно автоматы бокового управления объединяются с демпферами рыскания и крена. Тогда их совместные законы управления имеют следующий вид:
о + к Х Д х н, (7.36) кИ1о,х + к Х э Д х э. (7.37) Последовательное -включение исполнительного устройства автомата в механическую проводку бустерной или электродистанцйонной системы управления рулем направления или элеронов позволяет суммировать отклонения руля пилотом и автоматом.